Hey, I'm Manoj Kumar
Building the future with intelligent robots and AI —turning complex algorithms into real-world impact.
Bridging the gap between imagination and reality
Robotics & AI Innovator.
I'm a specialized Robotics Engineer with expertise in developing autonomous systems for UAVs and ground robots. My work focuses on creating advanced perception systems using SLAM and computer vision, designing robust navigation algorithms, and optimizing flight controller firmware with ROS2 and PX4. I've engineered solutions for complex environments—from Visual SLAM systems that enable navigation in GPS-denied spaces to specialized pose estimation models for combat sports analysis achieving 96% accuracy. With experience in sensor fusion, embedded programming, and edge computing optimization, I develop impactful robotics solutions that solve real-world challenges. My diverse portfolio includes autonomous drone platforms, self-balancing robots, and AI-powered analytics systems for major sports leagues. Passionate about applying my expertise in autonomous navigation and multi-sensor fusion to create innovative technologies that contribute to sustainable ecosystems and a better future.

Robotics Developer

AI Solutions Engineer

Computer Vision Engineer
What I have done so far..
Work Experience

Robotics Engineer
Autonome Labs PVT LTD
- Led the design and deployment of advanced autonomous navigation systems using ROS2 and PX4, incorporating Visual SLAM, multi-sensor fusion, and dynamic obstacle avoidance for robust performance in GPS-denied environments.
- Developed and optimized low-level PX4 firmware modules and sensor drivers across diverse UAV platforms, enhancing flight control stability, state estimation accuracy, and real-time responsiveness.
- Built end-to-end computer vision pipelines for object detection, feature tracking, and 3D mapping, enabling high-reliability navigation and situational awareness in complex, cluttered environments.
- Designed modular behaviour trees and hierarchical state machines for autonomous task execution, supporting payload delivery, infrastructure inspection, and adaptive path planning under dynamic constraints.
- Optimized SLAM and perception algorithms for real-time execution on edge devices (Jetson, QRB5, VOXL), reducing compute load while maintaining mission-critical reliability.
'%3e%3cpath%20id='Path_41'%20data-name='Path%2041'%20d='M274.474,46.849l-11.22,5.137-1.152.528-11.6,5.313V70.686h12.756V52.514h11.22V70.686H287.23V41.009Z'%20fill='%234ebc88'/%3e%3cpath%20id='Path_42'%20data-name='Path%2042'%20d='M274.474,22.662v17.1h-11.22v-17.1H250.5v28.6l12.756-5.841,11.22-5.137,1.152-.528,11.6-5.313V22.662Z'%20fill='%234ebc88'/%3e%3cpath%20id='Path_43'%20data-name='Path%2043'%20d='M305.606,22.662H292.85v9.211l12.756-5.841Z'%20fill='%234ebc88'/%3e%3cpath%20id='Path_44'%20data-name='Path%2044'%20d='M292.85,70.686h12.756V32.595L292.85,38.435Z'%20fill='%234ebc88'/%3e%3cpath%20id='Path_45'%20data-name='Path%2045'%20d='M334.379,22.662H326.65l-5.026,2.3-10.4,4.761V35.4h10.4V70.686h12.756V35.4h10.4V22.662Z'%20fill='%234ebc88'/%3e%3c/g%3e%3c/svg%3e)
Computer Vision Engineer
Hitcoach
- Trained and deployed high-performance computer vision models for MMA fighter detection, achieving 96% accuracy in real-time environments.
- Implemented models like Kalman filter, DeepSort & SAM trackers to enhance detection consistency and reduce false positives, and deployed in the app HITAI.
- Developed specialized pose estimation models for complex MMA fighting positions, enabling accurate punch, kick, grappling and technique detection in challenging scenarios with occlusion and rapid movement.
- Designed and implemented AI-powered analytics systems for Disney Hotstar Pro Kabaddi League, providing real-time player tracking, performance metrics, and predictive game analysis.
- Optimized deep learning models for deployment on mobile and cloud platforms, achieving a 40% reduction in inference time while maintaining detection accuracy for live sports broadcasting applications.

AI/ML Developer
MAASR LTD
- Led the training and fine-tuning of large language models for domain-specific applications, implementing custom datasets and optimization techniques that improved model performance by 35% for financial data processing.
- Engineered production-ready LLM-based solutions for intelligent task automation and sentiment analysis, integrating advanced prompt engineering methods that improved operational efficiency by 25%.
- Designed and implemented scalable cloud architecture using AWS services and Docker, creating robust and cost-efficient infrastructure for training and serving AI models in production.
- Integrated advanced LLMs and NLP technologies (SpaCy, NLTK, LangChain), reducing manual task processing by 40%.
- Orchestrated AWS deployment using Docker and Kubernetes, cutting deployment time by 70% and achieving 95% customer satisfaction through direct stakeholder engagement.

Robotics Engineer
Dash Dot Robotics
- Engineered real-time tracking and sensor-based autonomous functionality using C++ and ROS2 for Box-it, an autonomous inventory management system.
- Developed advanced communication protocols leveraging star and mesh network configurations for optimized device connectivity.
- Ensured seamless integration with AWS cloud services, enhancing real-time monitoring and management capabilities through efficient data transmission between Box-it devices and cloud infrastructure.
- Engineered a ML-powered UI for inventory analysis and optimization, implementing real-time management features that significantly reduced operational discrepancies and enhanced system efficiency.
- Led a 10-engineer team, implementing features that eliminated manual counting and increased sales by 4-8% through improved accuracy.
Technologies
C++
PX4
Raspberry Pi
SLAM
Lidar
Jetson Nano
Nav2
Path Planning
OpenCV
C
Python
Rust
PHP
JavaScript
SQL
Scikit-learn
PyTorch
Fastai
HuggingFace
Django
Node.js
ReactJS
Docker
GIT
MySQL
Linux
AWS
GCP
ROS2
My Work
My Projects
Following projects shows my skills and experience through real world examples of my work. Each project is briefly described with links to code repositories and live demos in it reflects my ability to solve real world problems work with different technologies and manage different technologies and manage projects effectively.

Pegasus: Autonomous Drone Platform
Designed and developed a complete autonomous drone system with advanced collision avoidance capabilities specifically engineered for non-expert pilots. Implemented Vector Field Histogram algorithms and Kalman filters integrated with PX4 flight controller for robust obstacle detection and avoidance in dynamic environments.
#ROS2
#PX4
#C++
#Nav2
#Sensor Fusion
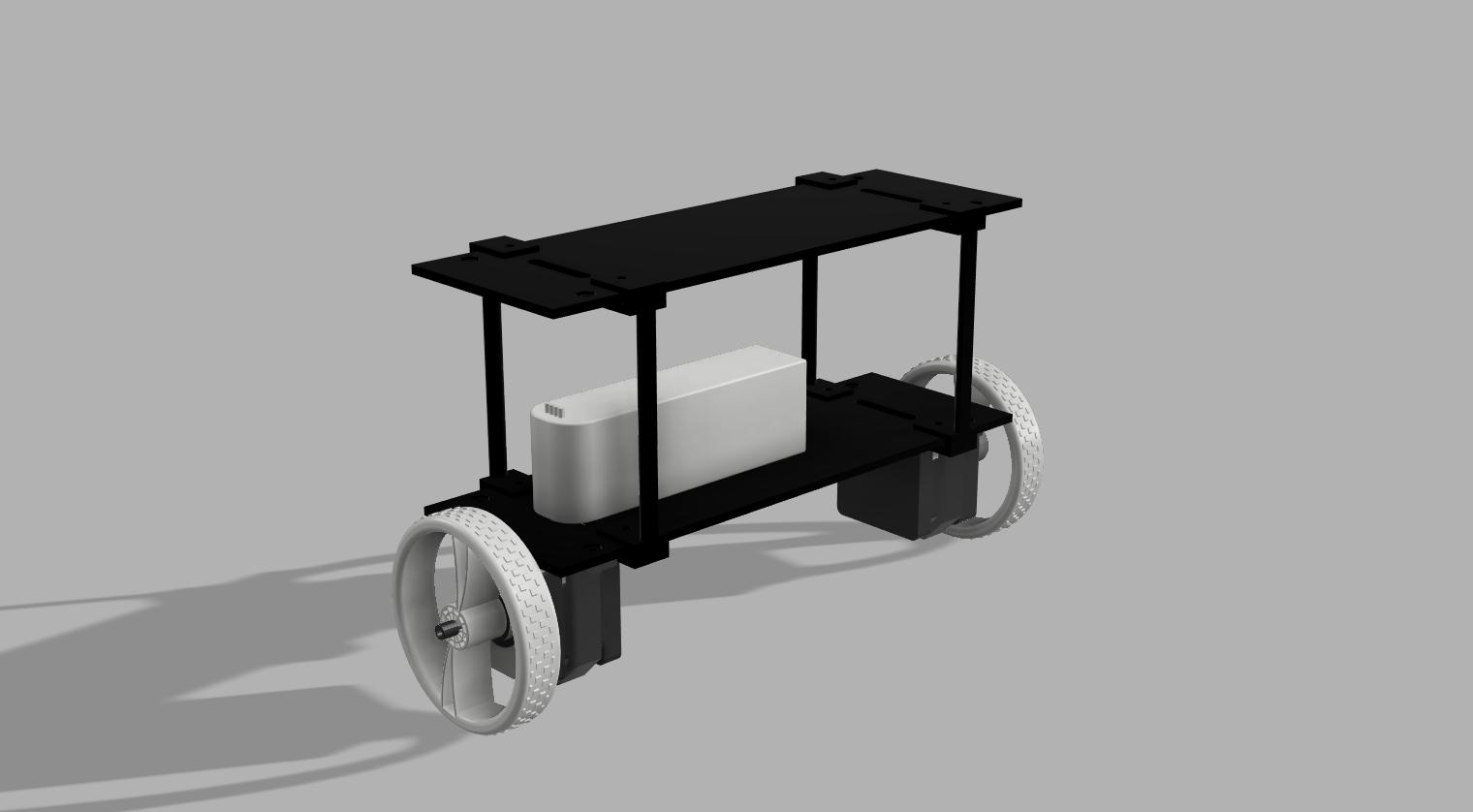
ACTO: Advanced Self-Balancing Robot
Engineered a comprehensive self-balancing robotics platform, implementing multi-modal perception systems (Visual-SLAM, QVIO, LiDAR) on Raspberry Pi hardware. Developed custom sensor fusion algorithms to integrate IMU and visual data for robust state estimation while maintaining balance through optimized PID control.
#ROS2
#Control Theory
#Sensor Fusion
#Visual SLAM
#Embedded Systems

Frontier-Based Exploration using Meta-Learning
Developed a meta-learning framework for Search and Rescue (SAR) robot simulations using MAML, REPTILE, and Zero-shot Learning. Implemented Deep RL algorithms (PPO, A3C), achieving 40% increase in exploration capabilities and 30% improvement in decision-making accuracy in complex environments.
#Deep RL
#Meta-Learning
#PyTorch
#ROS2
#Gazebo

Spot - Fire Defender Robot
Engineered fire detection system for Boston Dynamics' Spot robot using Python API and ROS. Implemented reinforcement learning algorithms (DQN, PPO) for navigation and decision-making in hazardous environments. Integrated thermal imaging and LIDAR data processing for enhanced situational awareness.
#C++
#SLAM
#OpenCV
#Spot SDK
#GCP

Deliveri-Bot: Autonomous Hotel Delivery Robot
Developed an AI-powered robot for automating hotel room service deliveries, enhancing guest experience and operational efficiency. Implemented autonomous navigation in dynamic indoor environments, obstacle avoidance, and secure delivery protocols using ROS, Python, and advanced SLAM algorithms.
#ROS
#Python
#PyTorch
#SLAM
#OpenCV

Hashtag Generator ST7
Developed a scalable hashtag generation system for social media content, leveraging NLP for sentiment analysis and entity recognition to enhance hashtag relevance. Implemented continuous model training and real-time monitoring for improved accuracy and user insights using BERT and XLNet.
#Python
#BERT
#XLNet
#AWS
#Docker
Let's Create a Better World Together